5
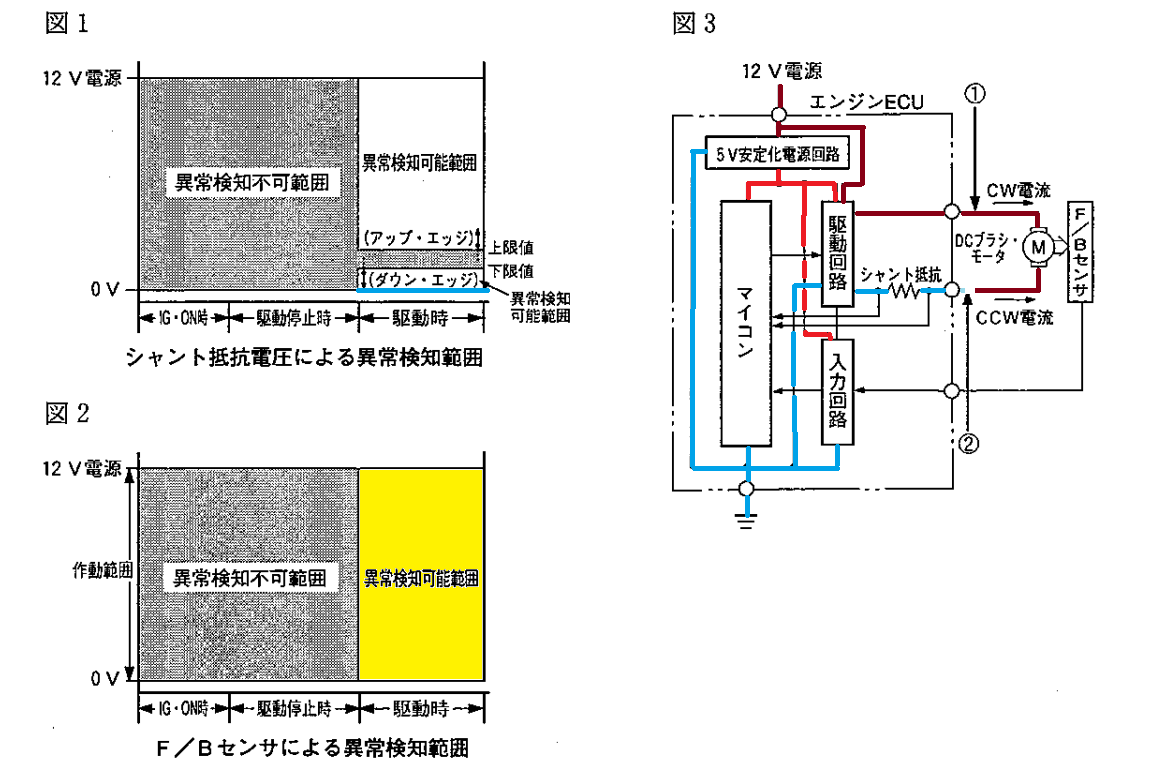
図1と図2に示す異常検知範囲をもつ図3のリニアDCブラシ・モータ(PWMの小規模アクチュエータ)を用いた回路の異常検知に関する記述として,適切なものは次のうちどれか。

(1)CW駆動時,①の箇所とボデー間に短絡(地絡)があるときは,シャント抵抗両端間の電圧が0Vになるため,マイコンは下限値の開催をダウン・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較して異常検知を行う。
(2)CCW駆動時,①の箇所に断線があるときは,モータに電流が流れないため,シャント抵抗による診断回路により,マイコンは下限値の閾値をダウン・エッジする信号診断電圧を検出して異常検知を行うが,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較しての異常検知は行わない。
(3)CCW駆動時,モータがロックしたときは,シャント抵抗両端間の電圧が0Vになるため,マイコンは下限値の閾値をダウン・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較することにより異常検知を行う。
(4)CW駆動時,②の箇所に断線があるときは,モータに電流が流れないため,シャント抵抗による診断回路により,マイコンは上限値の閾値をアップ・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較することにより異常検知を行う。
解く
CW駆動

(1)CW駆動時,①の箇所とボデー間に短絡(地絡)があるときは,シャント抵抗両端間の電圧が0Vになるため,マイコンは下限値の開催をダウン・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較して異常検知を行う。
適切

(2)CCW駆動時,①の箇所に断線があるときは,モータに電流が流れないため,シャント抵抗による診断回路により,マイコンは下限値の閾値をダウン・エッジする信号診断電圧を検出して異常検知を行うが,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較しての異常検知は行わない。
不適切

①の箇所に断線

また,フィードバック・センサ(以下,F/Bセンサという。)は,図のモータ部の太線で囲んだ部分がモータと一体に取り付けられ,マイコンは,信号電圧に基づく制御目標値を確認するために,駆動速度及び駆動位置を検出する。

(3)CCW駆動時,モータがロックしたときは,シャント抵抗両端間の電圧が0Vになるため,マイコンは下限値の閾値をダウン・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較することにより異常検知を行う。
不適切
直流の概念で考えると解らなくなります。
このモータの信号電流は交番しています。
交番する電流がコイルに流れて、回転することによって電流の流れがさえぎられる。
止まっているときはコイルはそのまんま抵抗となり、電流が流れすぎる。

(4)CW駆動時,②の箇所に断線があるときは,モータに電流が流れないため,シャント抵抗による診断回路により,マイコンは上限値の閾値をアップ・エッジする信号診断電圧を検出して異常検知を行い,更に,F/Bセンサからの診断信号電圧とマイコンの駆動の信号電圧マップとを比較することにより異常検知を行う。
不適切
よって答えは(1)