リニアDCブラシレス・モータ(三相交流の小規模のアクチュエータ)
(a)CWとCCWの駆動を有する駆動回路構成
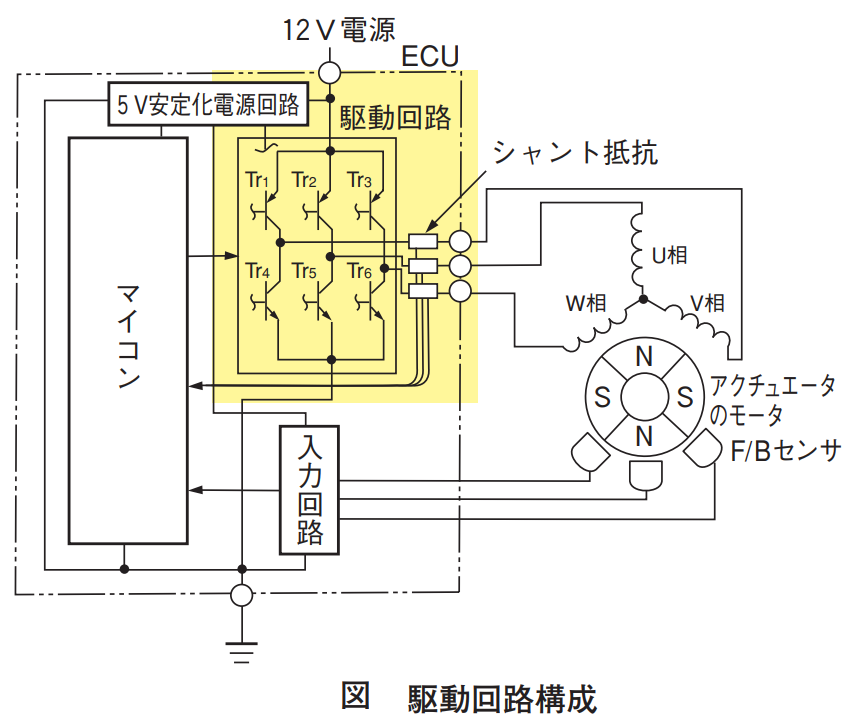
図に示すリニアDCブラシレス・モータは,CWとCCWの相互方向駆動をもつもので,駆動回路内のインバータにより直流を三相交流に変換し,周波数の変化により回転速度制御を行うもので,小規模のアクチュエータとして,電子制御式スロットル装置,ISCVなどに用いられ,車両の運転条件により駆動される。
(注)CW(時計回り)駆動及びCCW(反時計回り)駆動における各コイルに入力する電圧の順序は,メーカや車種によって異なるため,本教科書では一例を示している。
(b)回路構成
回路の構成は,図のようにマイコンからの信号電圧によりECU内の駆動回路が働き,ECU内12V電源⇒駆動回路のインバータで三相交流(U相,V相,W相)に変換⇒駆動回路のTr1,,Tr2,Tr3(押出用)⇒アクチュエータのモータ⇒駆動回路のTr4,Tr5,Tr6(引込用)⇒ECU内のアース⇒ボデー・アースに電流を引き込む回路が構成され,アクチュエータが駆動する。

(c)信号形態
図に示す駆動電圧波形は,U相,V相,W相の駆動電圧で,この電圧がモータに作用して駆動する。

CW駆動は,図2一395のU相→V相,V相→W相,W相→U相の周期で電流が流れ,CCW駆動は,U相→W相,W相→V相,V相→U相の周期に電流が流れる。
CW駆動

CCW駆動

すなわち,CW駆動からCCW駆動,又はCCW駆動からCW駆動になるときには,各二相に流れる電流の向き(各二相に掛かる電圧の極性)と順序が変化してモータが逆回転する。
マイコンの信号電圧に基づき,駆動回路でこのCWとCCWの切り替えを行い,ブラシレス・モータの回転方向と駆動力が制御される。
また,マイコンの信号電圧に基づく制御目標値を確認するために,F/Bセンサで駆動位置及び駆動速度を確認しており,F/Bセンサは,図のようにモータ部と一体に取り付けられている。

回転位置検出には,この三相交流の入力タイミングに基づき,周波数に同期して回転するロータの回転位置を検出して,マイコンにフィードバックすることで算定している。
駆動速度の検出には,ホール素子などのF/Bセンサを用いて,U相,V相,W相の各相の磁束を検出し,マイコンにフィードバックして三相交流を入力するタイミングを算定する。
図は,中性点と各相端子間の駆動電圧波形で,

図は,ホール素子のF/Bセンサが検出するロータの磁束検出波形で,駆動電圧波形に同期したものになっている。

〔参考〕中性点と各相端子間の駆動電圧波形は,中性点から引き出して測定した実験波形である。
(d)異常検知(F/Bセンサ付き)
(ⅰ)異常検知の範囲
マイコンが異常検知する仕組みは,図に示すように回路構成上,駆動回路の診断回路とF/Bセンサ診断回路の2箇所で行っている。

図は,U相,V相,W相に関する駆動回路上の異常検知の特性図で,マイコンからの信号電圧(駆動情報)に基づき,異常作動状態を駆動回路に設けられた診断回路(シャント抵抗両端の電圧検出)によりマイコンが検出する。

マイコンは,回路正常時には,診断回路により閾値の範囲内の電圧を検出する。

また,モータのロック(シャント抵抗両端に異常電圧が掛かる。)又は断線(シャント抵抗両端にOVが掛かる。)が発生すると,マイコンは,閾値をアップ・エッジ又はダウン・エッジする作動診断信号電圧を検出して異常検知を行う。

(注)図の駆動回路の中には,過電流保護回路(カレント・リミッタ)の一部としてU相,V相,W相ごとに診断回路(シャント信号電圧回路)が設けられ,過電流の検出回路を行っているが,図の等価回路上では省略している

図は,モータの作動に応じて,モータの作動遅れ(駆動情報に対して駆動位置に達する時間が過ぎた場合)や過作動(駆動情報に対して駆動位置を超えた場合)などの作動状態に関するF/Bセンサによる異常検知の特性図で,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,駆動時のすべての領域において,固定された作動診断信号電圧を検出したときに異常検知を行う。

(ⅱ)異常検知の回路
診断回路(シャント抵抗による診断回路及びF/Bセンサ診断回路)の異常検知(CW駆動)
① 図の駆動時(CW駆動)にの部分の回路において,アクチュエータのモータ・コイル(U相,V相,W相)又はモータ駆動線(U相,V相,W相)のいずれかに断線が発生すると,該当するモータ駆動相には,電流が流れないため,図中の(注)シャント抵抗による診断回路(OVの電圧が掛かる。)により,マイコンは,閾値をダウン・エッジする作動診断信号電圧を検出して異常検知を行う。

更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの信号電圧マップとの比較により,固定(変化なし,以下同じ。)された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

(注1)図の駆動回路の中には,過電流保護回路(カレント・リミッタ)の一部として診断回路(シャント信号電圧回路)が設けられ,過電流の検出回路を行っているが,図の等価回路上では省略している。

また,診断回路(シャント信号電圧回路)は,U相,V相,W相のそれぞれに設定している。CW駆動時(U相→V相「U相」,V相→W相「V相」,W相→U相「W相」の周期)の異常検知には,該当する()内の診断回路が作用し,CCW(U相→W相「U相」,W相→V相「W相」,V相→U相「V相」の周期)時の異常検知には,該当する()内の診断回路が作用する。

(注2)
ここでの異常検知は,アクチュエータの作動状態の異常検知に限定し,F/Bセンサ自体の異常検知は,センサの項を参照する。
② 図の駆動時に(CW駆動)にの部分の回路において,アクチュエータのモータがロックしているときには,図中のシャント抵抗による診断回路(シャント抵抗両端の異常電圧が掛かる。)により,マイコンは,閾値をアップ・エッジする作動診断信号電圧を検出して異常検知を行う。

|
電気モーターが負荷に直面すると、電流が増加する現象。
電気モーターは、回転子と固定子という2つの部分から成り立っています。回転子はモーターの軸を回転させる部分であり、固定子は回転子を取り囲む部分です。
誘導電動機の原理: 電気モーターは、回転子に誘導電流が発生することで動作します。 固定子によって作られる回転磁界によって、回転子に誘導起電力が発生し、電流が流れます。 この誘導起電力によって、回転子はトルクを発生させて回転します。 負荷がかかるとどうなるか: モーターに負荷がかかると、回転数が落ち、トルクが増加します。 回転数が落ちると、逆起電力が小さくなります。 逆起電力が小さくなると、モーターに加える電圧との差が大きくなり、電流が増加します。 この増加した電流によって、モーターは負荷に対抗して回転します。 多くの場合、回転数制御を行うためにフィードバックがあります。 回転数が落ちると、制御によってトルクを増加させ、元の回転数に戻そうとします。 方法として、回転磁界を速くして滑りを大きくするか、回転磁界の磁束密度を大きくするかを使用します。 簡単に言えば、モーターは外部からの負荷に応じて電流を調整し、適切なトルクで回転するように調整しているのです。 |
更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

③ 図の駆動時に(CW駆動)に■■■■部分の回路において,アクチュエータのモータ駆動線に短絡があるときには,図中のシャント抵抗による診断回路(最大電流が流れてシャント抵抗両端に異常電圧が掛かる。)により,マイコンは,閾値をアップ・エッジする作動診断信号電圧を検出して異常検知を行う。

更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

診断回路(シャント抵抗による診断回路及びF/Bセンサ診断回路)の異常検知(CCW駆動)
① 図の駆動時(CCW駆動)にの部分の回路において,アクチュエータのモータ・コイル(U相,V相,W相)又はモータ駆動線(U相,V相,W相)のいずれかに断線が発生すると,該当するモータ駆動相には,電流が流れないため,図中のシャント抵抗による診断回路(OVの電圧が掛かる。)により,マイコンは,閾値をダウン・エッジする作動診断信号電圧を検出して異常検知を行う。

更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

(注)CW駆動時(U相→V相「U相」,V相→W相「V相」,W相→U相「W相」の周期)の異常検知には,該当する()内の診断回路が作用する。
(注)シャント抵抗診断回路の詳細はリニアDCブラシ・モータの項を参照。
② 図の駆動時(CCW駆動)にの部分の回路において,アクチュエータのモータがロックしているときには,図中のシャント抵抗による診断回路(シャント抵抗の両端に異常電圧が掛かる。)により,マイコンは,閾値をアップ・エッジする作動診断信号電圧を検出して異常検知を行う。

更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

③ 図2一406の駆動時(CCW駆動)に■■■■部分の回路において,アクチュエータのモータ駆動線(モータコイルも)に短絡があるときには,図中のシャント抵抗による診断回路(最大電流が流れてシャント抵抗の両端に異常電圧が掛かる。)により,マイコンは,閾値をアップ・エッジする作動診断信号電圧を検出して異常検知を行う。
CW駆動の短絡もコイルを入れておかねば・・・

更に,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

このあらかじめ設定された「二つの検出条件」の内,いずれかが成立,又は両方が成立することにより,異常検知を行う。

(注)CCW(U相→W相「U相」,W相→V相「W相」,V相→U相「V相」の周期)時の異常検知には,該当する()内の診断回路が作用する。
F/Bセンサによる診断回路の異常検知
① 図の駆動時にの部分の回路において,アクチュエータのモータが過作動を起こしているときには,マイコンは,F/Bセンサからの作動診断信号電圧とマイコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

② 図の駆動時にの部分の回路において,アクチュエータのモータが作動遅れを起こしているときには,マイコンは,F/Bセンサからの作動診断信号電圧とマィコンの駆動の信号電圧マップとの比較により,固定された作動診断信号電圧を検出して異常検知を行う。

(e)回路点検
リニアDCブラシレス・モータ(三相交流の小規模のアクチュエータ)の回路では,駆動回路(インバータ内蔵)において,三相交流を出力している。この回路の点検は,駆動停止時,駆動時における駆動電圧などについて説明する。
ここでは,U相駆動電圧線とは,ECU駆動端子⇔U相間,V相駆動電圧線とは,ECU駆動端子⇔V相間,W相駆動電圧線とは,ECU駆動端子⇔W相間の配線をいい,駆動電圧とは,U相⇔V相,V相⇔W相,W相⇔U相の各端子間に発生する二相の合計の電圧をいう。

(ⅰ)駆動電圧の回路点検
① 駆動停止時の点検
㋑ 図に示すV1(U相とV相間),V2(V相とW相間),V3(W相とU相間)を測定した場合,各相間電圧が発生しないこと。

電圧が発生していれば,ECU本体の異常が推測できる。

② 駆動時の点検
㋑ 図に示すV1とV4,V2とV5,V3とV6をオシロスコープで測定した場合に,それぞれの電圧が同じになること。

ECU側とモータ側の電圧に差が発生していれば,その駆動電圧線の異常(断線,接触抵抗などの増大)が推測できる。

駆動電圧線が正常の場合で,アクチュエータの動作が不良のときは,モータ又はECU本体の異常が推測できる。

過電流制限器(オーバ・カレント・リミッタ)をもっている装置では,モータの拘束停止時及び機械的負荷で過大トルクが発生した場合に,モータのコイルなどの焼損を防止するため,駆動能力の低減又は駆動停止を行う制御に入るので,機械機構などの確認が必要となる。

なお,駆動条件下の点検では,F/Bセンサの異常による駆動異常の可能性もあるので,これらも併せて確認すること。

(ⅱ)駆動情報と駆動電圧の整合確認
回転速度の変化は,各コイルに流す電流の周波数の変化により行うため,図のV1の駆動電圧をオシロスコープで測定して点検する。

モータの回転を上昇させたとき,図の駆動電圧波形の電圧が同一で,周波数が高くなれば,ECU本体,ECU電源線,V相駆動電圧線,W相駆動電圧線,アクチュエータ,ECUアース線及びボデー・アースは,正常である。

測定電圧特性が図に示す電圧特性から外れる場合は,(ⅰ)駆動電圧の回路点検を例に,不具合箇所の切り分けにより,ECU本体,ECU電源線,V相駆動電圧線,W相駆動電圧線,ECUアース線,ボデー・アース,アクチュエータのいずれかの異常を推測する。
2級教科書
ステップ・モータ式
ステップ・モータ式 ISCV は,図 のようにステータ・コイルとロータなどで構成されているステップ・モータ,並びに,バルブなどで構成されている。

ステップ・モータの作動原理は,図 のように規則正しく配置されたステータ・コイルとロータ(永久磁石)において,ステータ・コイルの励磁を 順序よく変えることにより,
ロータ(永久磁石)がステータ・コイルの磁力により一定のステップ数,回転するようになっている。

ステータ・コイルの励磁を図のように A から B のように右にずらすと,
ステータ・コイルの電磁石及びロータの永久磁石の N と S は引き合い, N と N , S と S は反発し合うため,ロータは C の位置まで 1 ステップ回転する。

実際のステップ・モータでは,ロータは,図 のように N , S合計で16極に励磁された磁石でできており,
ステータは, N , S 合計で 32 の磁極になっている。

実際(ステータ)は,図 のように 16 極のコアがあるものを 2 個使用し,一つのステータには,巻方向が異なる二つのコイルが巻かれ,また,四つの磁極がすべて位相をずらして取り付けてある。したがって,ロータ 1 回転では,ステータ・コイルの磁極の数の分, 32 ステップ分動くことになる。

図 の制御回路では,コントロール・ユニットのマイコンが, Tr1 , Tr2 , Tr3 , Tr4 と順に出力電流をべースに流して止めるため,各トランジスタが ON して,OFF し,四つのコイルには,一つずつ 順に電流が流れて止まる。

つまり,図 において,ステータ・コイルの S1 に電流を流したときには,図のようにNО.1 磁極が N 極, NО.3 磁極が S 極になり,

1 ステップ進んで S1 の電流を止めた後, S2 に電流を流すと,今度は NО.2 磁極が N 極,
NO.4 磁極が S 極となって 2 ステップ進む。

順次. S2 の電流を止めた後, S3 に電流を流すと,NO.3 磁極が N 極, NО.1 磁極が S 極になり, 3 ステップ進み

S3 の電流を止めた後。 S4 に電流を流すと NО.4 磁極が N 極, NО.2 磁極が S 極になって 4 ステップ進むこととなり, 1 ステップずつ回転していく。

逆回転させる場合には,図 の状態から, S2 , S1 , S4 , S3 と逆の順序に電流を流して止めていけばよい。ロータとバルブ・シャフトは,ナットとボルトの関係(ネジスプライン)になっており,ロータが回転した分,シャフトが軸方向に移動し,バルブがバイパス通路を広くしたり,狭くしたりして空気量を制御している。

ユニポーラ方式