22
図1に示すFSR(フェイルセーフ・リレー)駆動回路の異常検知範囲と,図2に示すPMR(ポンプ・モータ・リレー)駆動回路の異常検知範囲をもつ図3のABSのポンプ・モータ回路の異常検知に関する記述として,適切なものは次のうちどれか。
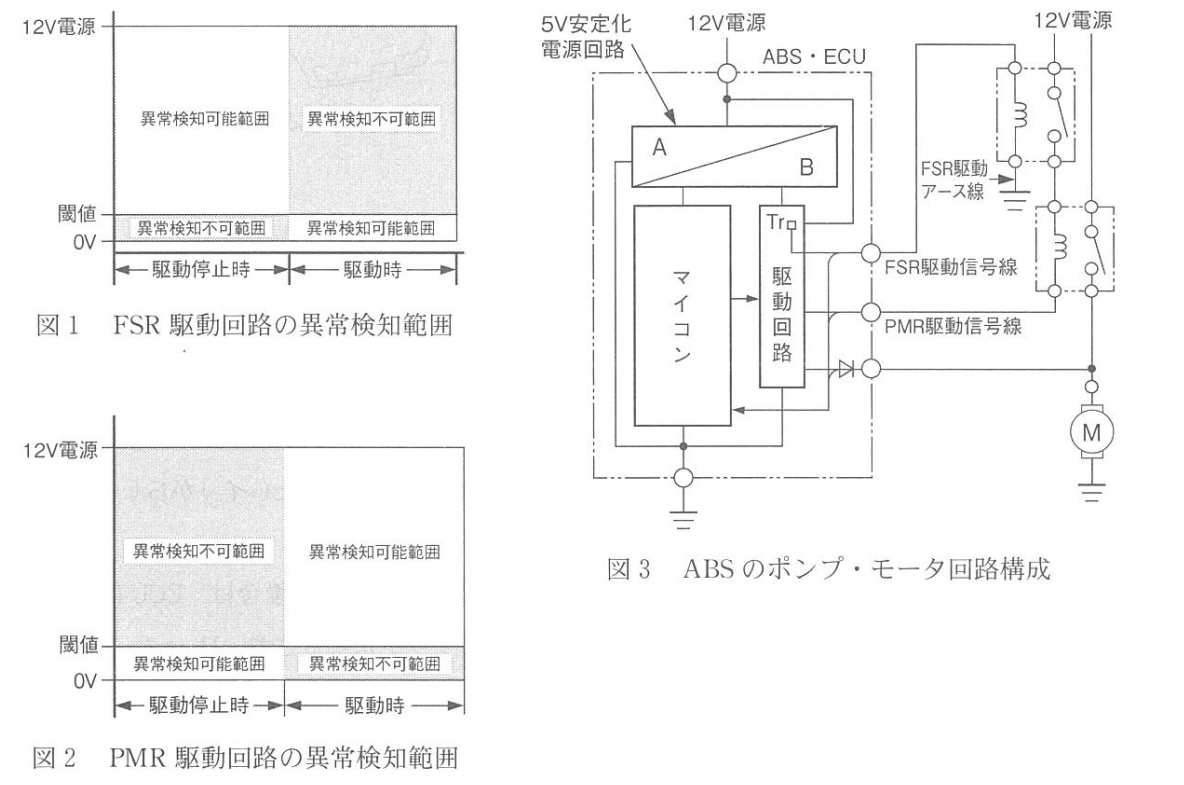
(1)FSR駆動停止条件時,FSR駆動信号線に短絡(地絡)がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。
(2)FSRのコンタクト・ポイントがONで,PMR駆動停止条件時に,PMR駆動信号線に短絡(地絡)がある場合,PMR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。
(3)FSR駆動条件時,FSR駆動アース線に断線がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。
(4)FSRのコンタクト・ポイントがONで,PMR駆動条件時に,PMR駆動信号線に短絡(地絡)がある場合,PMR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。
解く
(1)FSR駆動停止条件時,FSR駆動信号線に短絡(地絡)がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。

FSR駆動停止条件時,FSR駆動信号線に短絡(地絡)がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出するが、FSR駆動停止条件時は異常検知不可範囲であるため異常検知できない。
不適切
(2)FSRのコンタクト・ポイントがONで,PMR駆動停止条件時に,PMR駆動信号線に短絡(地絡)がある場合,PMR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。
適切

(3)FSR駆動条件時,FSR駆動アース線に断線がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。

FSR駆動条件時,FSR駆動アース線に断線がある場合,FSR駆動信号線から分岐した診断回路により,マイコンは,閾値をアップ・エッジする診断信号電圧を検出するが、FSR駆動条件時は異常検知不可範囲であるため異常検知できない。
不適切
(4)FSRのコンタクト・ポイントがONで,PMR駆動条件時に,PMR駆動信号線に短絡(地絡)がある場合,PMR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出して異常を検知する。

FSRのコンタクト・ポイントがONで,PMR駆動条件時に,PMR駆動信号線に短絡(地絡)がある場合,PMR駆動信号線から分岐した診断回路により,マイコンは,閾値をダウン・エッジする診断信号電圧を検出するが、PMR駆動条件時は異常検知不可範囲であるため異常検知できない。
不適切
よって答えは(2)