27
ABSの車輪速センサ(パルス・ジェネレータ式)に関する記述として,不適切なものは次のうちどれか。
|
(1)電源電圧をもたず,自己起電力による信号電圧であるため,回路構成上,上限値に関わる異常検知はできない。 |
|
(2)高いインピーダンスを有するため,信号線にはノイズ除去の目的でシールド線等を用いている。 |
|
(3)信号電圧は,車輪の回転速度が低いときは電圧が低く,回転速度が高くなると電圧は高くなるが,1周期の時間は変わらない。 |
|
(4)ノイズ混入の異常検知は,マイコンが高速域でセンサ信号を検出する場合に,他の関連センサ情報との相関を比較して行うものがある。 |
解く
|
(1)電源電圧をもたず,自己起電力による信号電圧であるため,回路構成上,上限値に関わる異常検知はできない。 適切 |
(2)高いインピーダンスを有するため,信号線にはノイズ除去の目的でシールド線等を用いている。
適切

(3)信号電圧は,車輪の回転速度が低いときは電圧が低く,回転速度が高くなると電圧は高くなるが,1周期の時間は変わらない。
不適切

(4)ノイズ混入の異常検知は,マイコンが高速域でセンサ信号を検出する場合に,他の関連センサ情報との相関を比較して行うものがある。
適切
ノイズ混入の対策では,ソフトウェアを使用し,マイコンが図に示すように高速域でセンサ信号情報を検出する場合に,他の関連センサ情報との相関を比較して,ノイズ混入の異常検知を行うものがある。

よって答えは(3)
パルス・ジェネレータ式
パルス・ジェネレータ式は,図(1)のように4輪に取り付けられており,検出した信号電圧は,ECUに送られ,各車輪の速度や車体速度の計算に利用される。

構造は,図(2)のように発電機形態のセンサが多く,車輪の回転部に取り付けられたロータ部とピックアップ・コイルで構成され,それらの間には,エア・ギャ
ップが設けられている。車輪の回転により,ギヤ・パルサの突起部が,ピックアップ・コイルの先端を通過することにより,磁束密度が変化して交流電圧が発生
する。

信号電圧を作るセンサの回路構成は,図に示すもので,ロータの回転に応じて,発生する起電力(交流電圧)がセンサの信号電圧であり,その起電力の信号電圧が入力回路を介してマイコンに入力される。

(a)信号形態
信号電圧は,ロータの回転が遅い場合には,図(1)のような電圧と周波数を有し,回転が速くなると図(2)のように電圧,周波数は共に高くなる。

したがって,最小信号電圧値をあらかじめ設定しているため,ECUは,入力回路により波形整形する電圧波形値が閾値をアップ・エッジしたとき,入力回路のカウンタ回路で5V安定化電源を基準として,図のような方形波(スケア・ウェーブ)に整形され,規定時間に発生するパルス数がカウントされて回転数と速度を検出する。

回転角度の検出は,ロータの1回転当たり歯数によって設定され,1周360度を歯数で除した値が1パルス時の角度であり,歯数が多いロータほど角度分解能が高くなる。
タイミングの検出は,発生した正弦波(サイン・ウェーブ)と入力回路で整形された方形波(スケア・ウェーブ)は相関関係にあるため,波形の立ち上がり又は波形の立ち下がりがタイミングの検出に利用される。
(b)異常検知
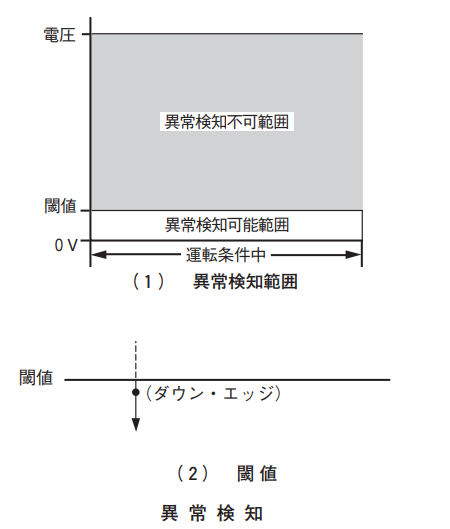
(i)異常検知範囲
パルス・ジェネレータ式センサは,電源電圧をもたず,自己起電力による信号電圧になるため,回路構成上,上限値に関わる異常検知はできない。
マイコンが異常検知する仕組みは,図(1)に示すようにマイコンの閾値と検出信号の比較が行われ,マイコンは,図(2)に示す閾値をダウン・エッジしたときに異常検知を行う。

センサの機能低下(特性異常)や各配線に異常(接触抵抗の増大など)が発生し,プログラムのマップ・データと検出信号電圧とが一致しない場合でも,この信号電圧がプログラムのマップ・データで設定した異常検知不可範囲の電圧値に入っていれば,マイコンは異常検知せず,通常制御が行われる。
また,自己起電力をもつパルス・ジェネレータ式センサは,インピーダンス(注参照)が大きいものと,運転状況に応じてインピーダンスが大きくなるものがあり,信号以外の電圧(ノイズ)が混入して異常信号を発生する場合がある。これらのノイズ混入の対策では,ソフトウェアを使用し,マイコンが図に示すように高速域でセンサ信号情報を検出する場合に,他の関連センサ情報との相関を比較して,ノイズ混入の異常検知を行うものがある。

(注)インピーダンスとは,交流回路における直流の場合の回路抵抗に当たるもので,電圧の最大値と電流の最大値との比で求められ,インピーダンスが高いほど,直流抵抗の影響は少なくなる。
なお,高いインピーダンスを有するセンサ回路では,ノイズ除去の目的で信号線にシールド線を用いており,図に示す信号線の破線で示す部分がこれに該当する。
